ADAMS 3회
Updated:
편심 회전 기기
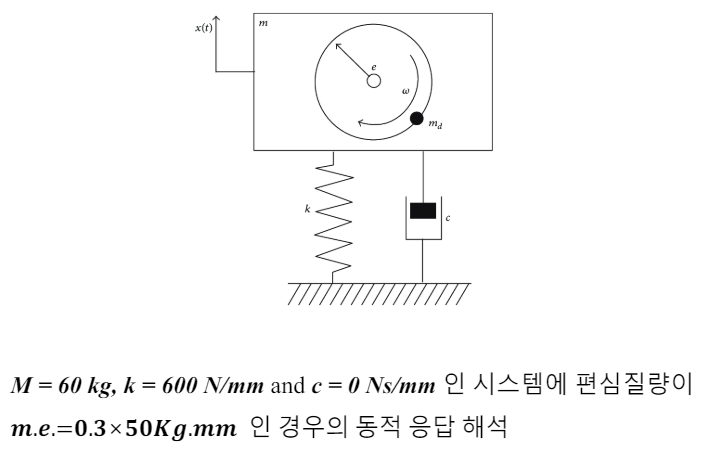
먼저 다음과 같이 모델링한다.
이제 Ground Marker를 (0, -50, 0)에 하나 더 추가하고 이 Marker와 Box의 cm을 서로 연결하는 Link를 추가하고 폭과 두께를 각각 1mm로 변경한다. 직경 10mm의 구를 링크 끝에 New part로 연결하고 구의 질량은 0.3kg으로 설정한다. 이후 구와 링크는 Fixed Joint로 결합시킨다.
\
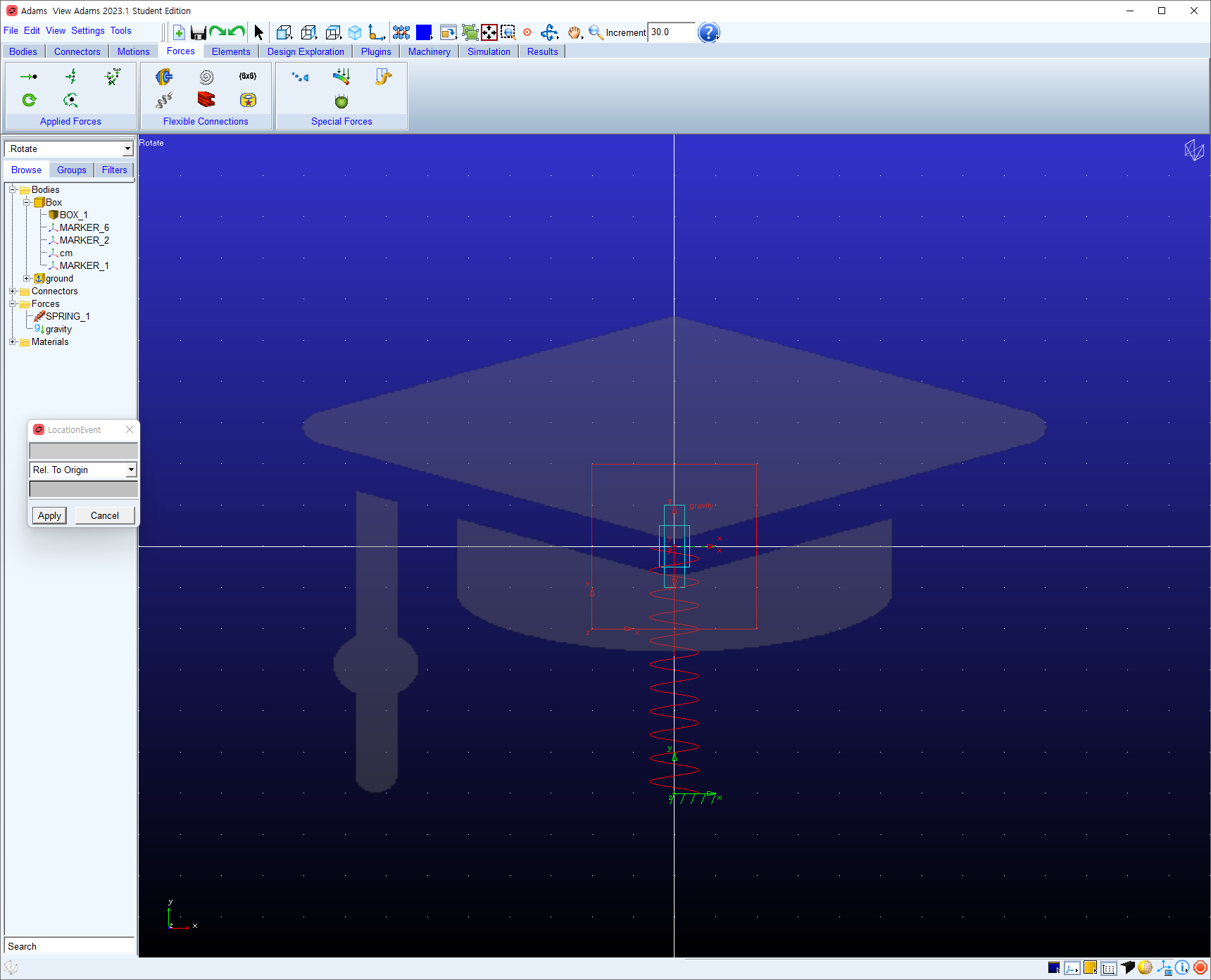
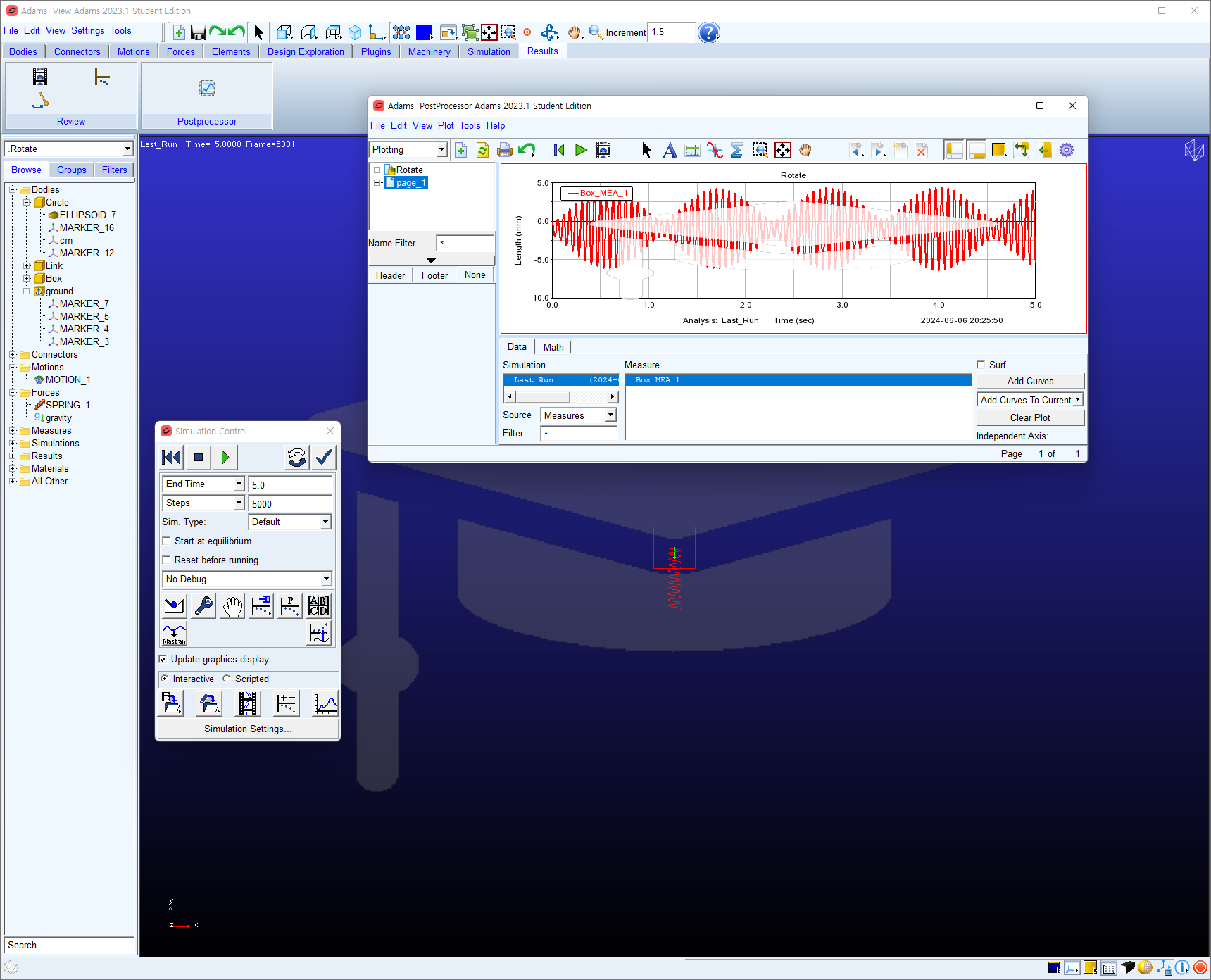
이제 링크의 다른 한쪽은 Box와 Revolute Joint로 결합시키고 링크를 회전시키기 위하여 Motions의 Joint Motion에서 Revolute Joint를 선택하고 joint에 운동을 부여한다.
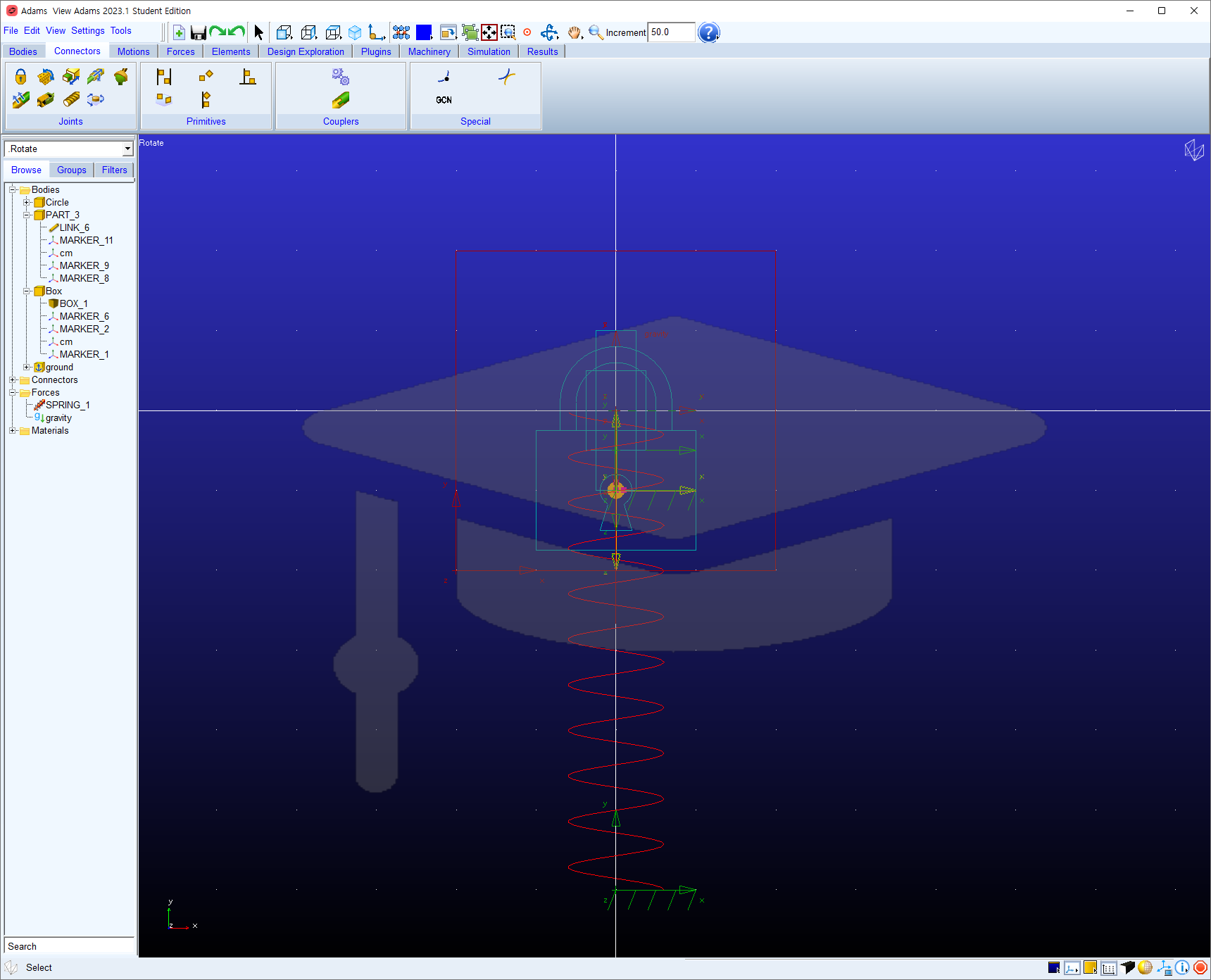
여기서 Type은 Velocity를 선택하고 Function에는 360.0d*15를 입력한다. 이는 초당 15회전의 속도로 링크를 회전시키라는 뜻이다. 5초간 5000 Step으로 시뮬레이션을 돌리면 Box의 cm위치를 다음과 같이 구할 수 있다.
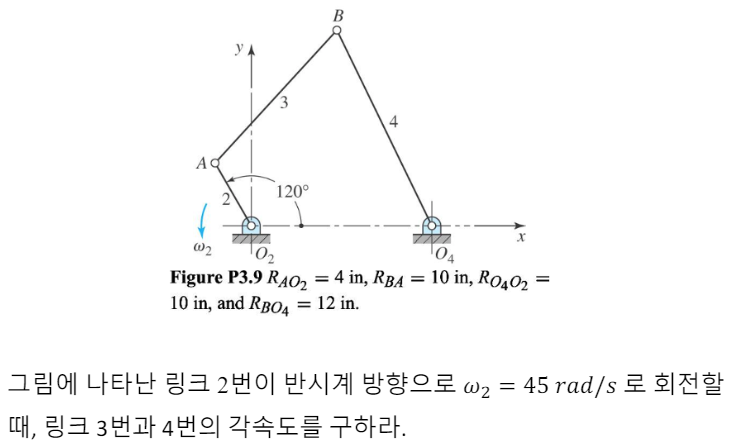
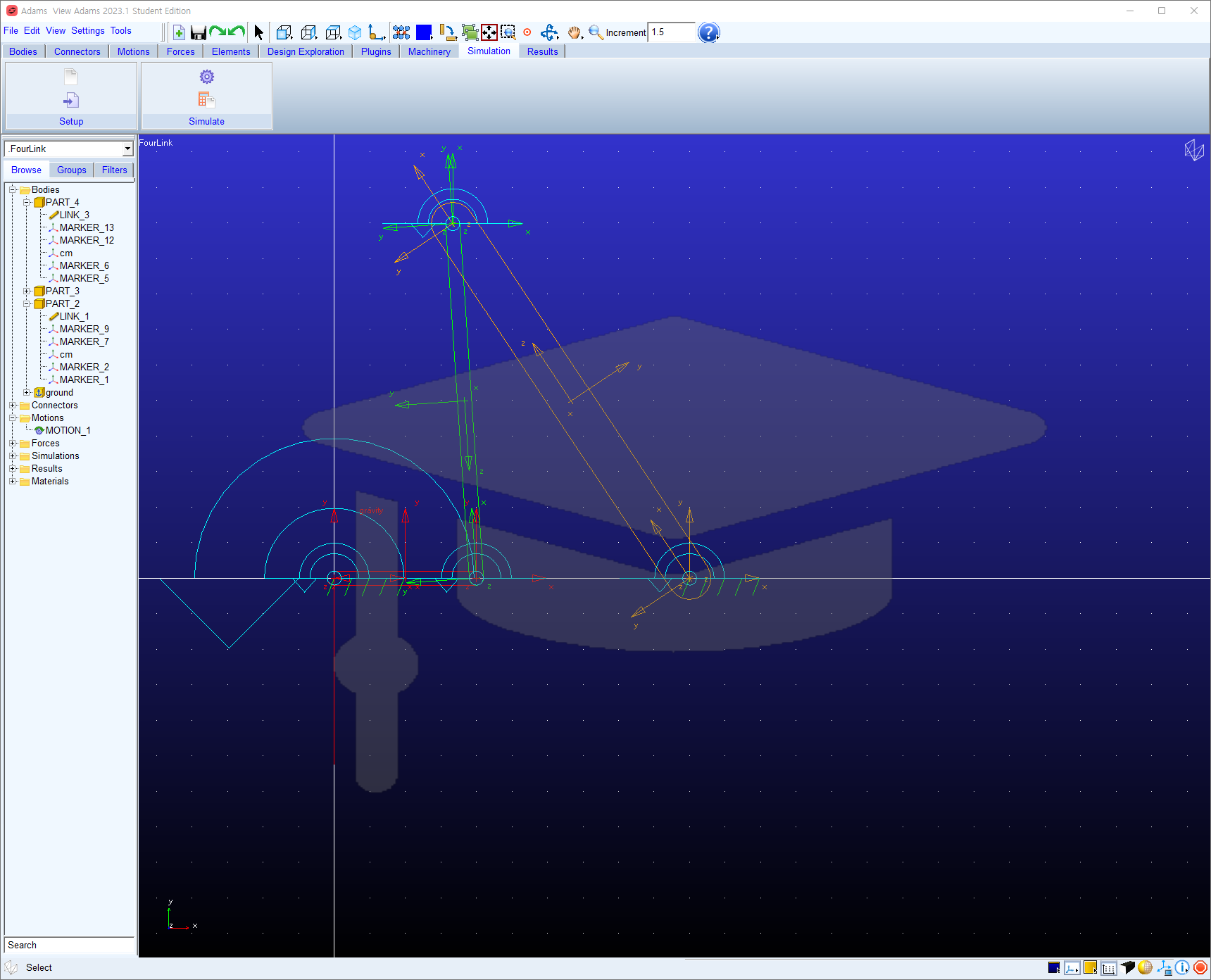
4절 링크
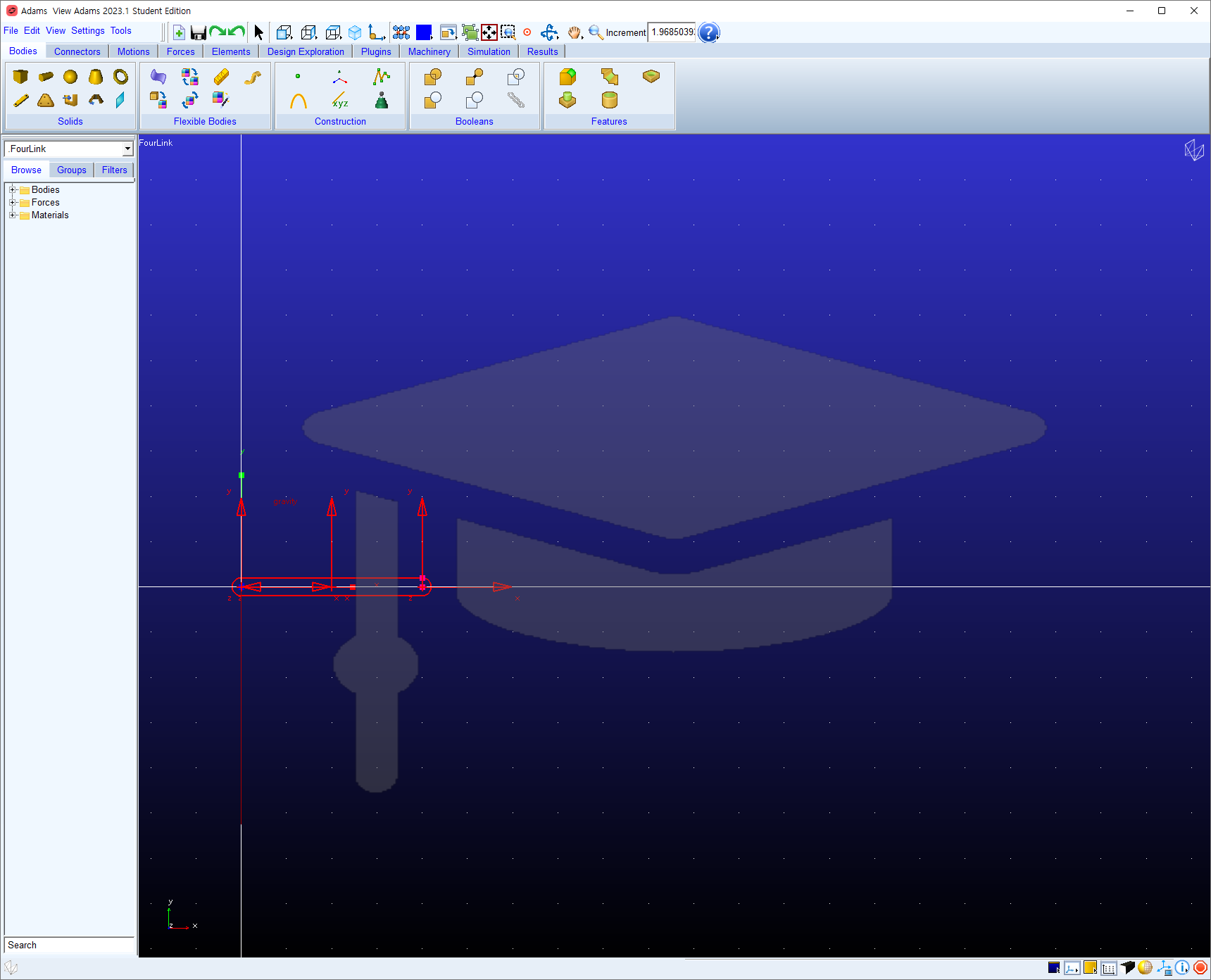
먼저 Link2를 먼저 모델링한다.
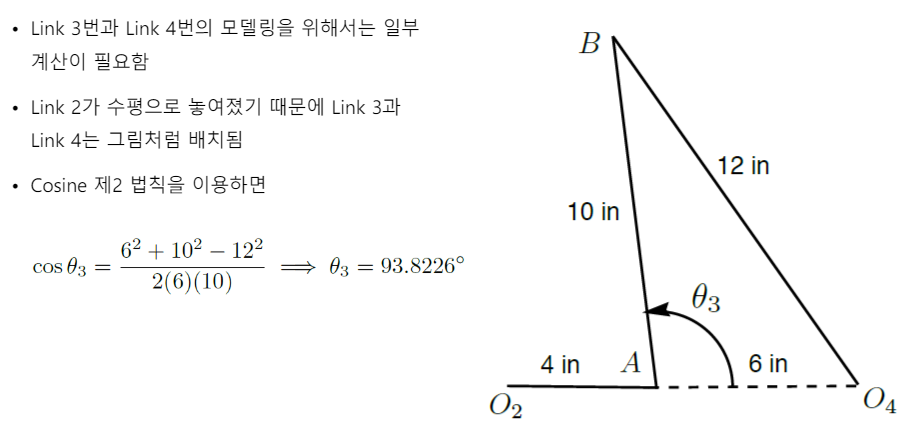
Link3과 Link4의 모델링을 위해서는 일부 계산이 필요하다. Link2가 수평으로 놓여졌기 때문에 Link3과 Link4를 그림처럼 배치한다. Cosine 제2 법칙을 적용하면 $\theta_3 = 93.8226$이다.
이제 다음과 같이 모델링을 한다. 이때 각 Link를 Revolute Joint로 연결한다.
이제 Link2에 Motion을 준다.
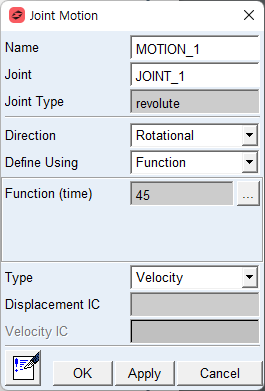
45 rad/s의 각속도로 Link2가 회전한다면, 1바퀴 회전하는데 걸리는 시간은 ((2*pi)/45)가 되고, Steps 개수는 360으로 설정한다. 시뮬레이션을 돌리고 Link3과 Link4의 각속도, Link2의 회전각도를 보면 다음과 같다.
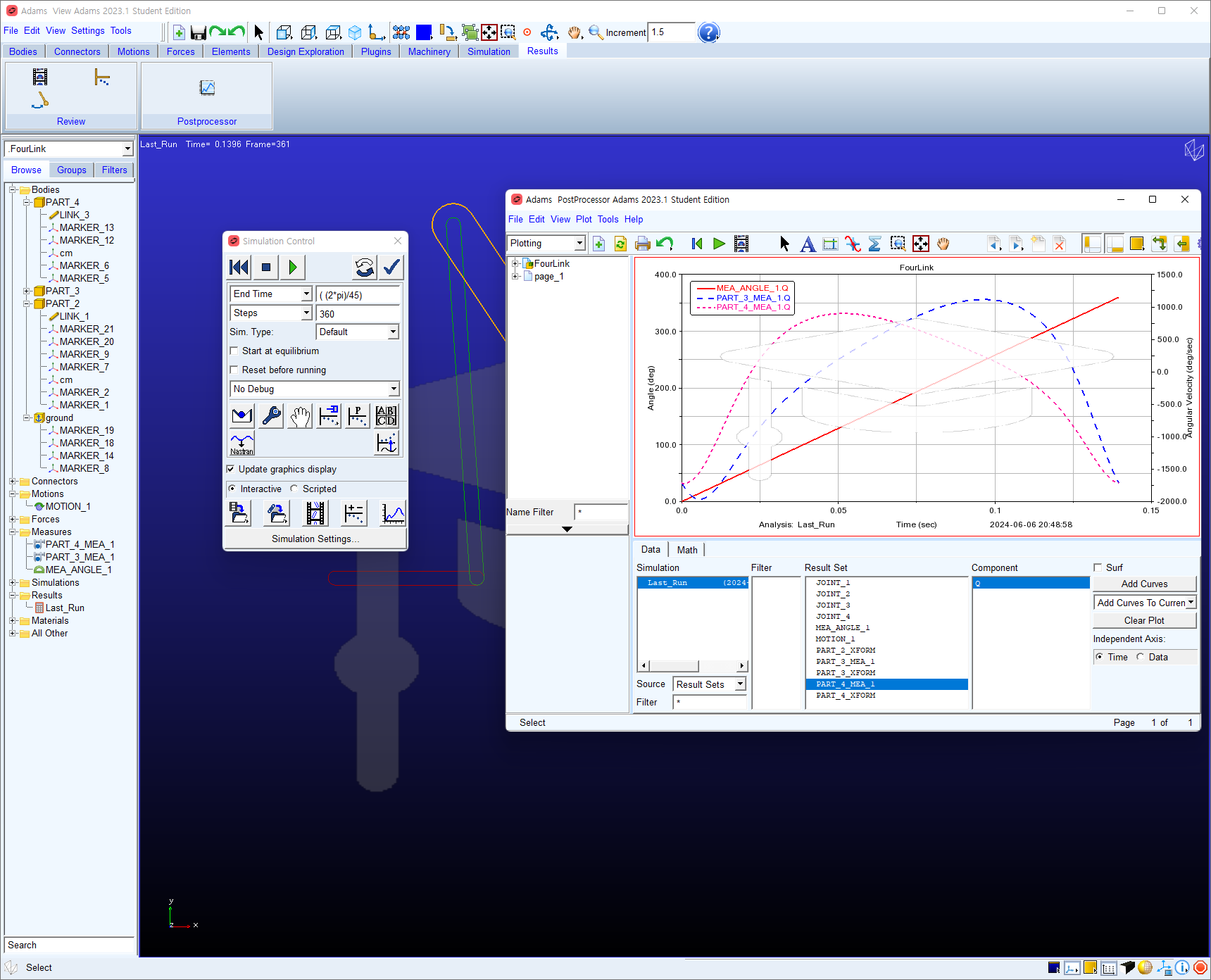
이제 그래프에 표시된 단위를 바꿔본다. x축의 time값을 deg로 바꾸려면 다음과 같이 수정해주고, haxis의 label을 Angle(rad)로 수정해준다.
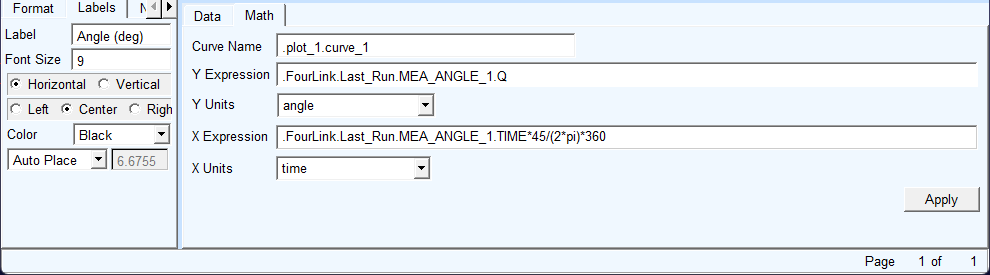
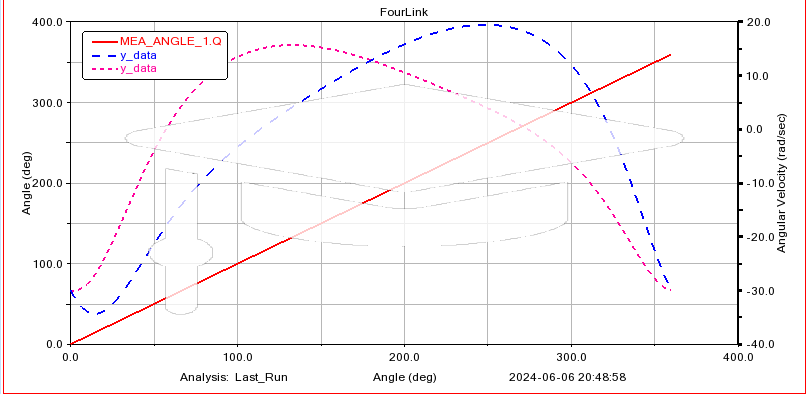
다음으로 시간-각속도 그래프에서 시간을 deg로, 각속도 deg/sec를 rad/sec로 바꾸러면 다음과 같이 수정한다.
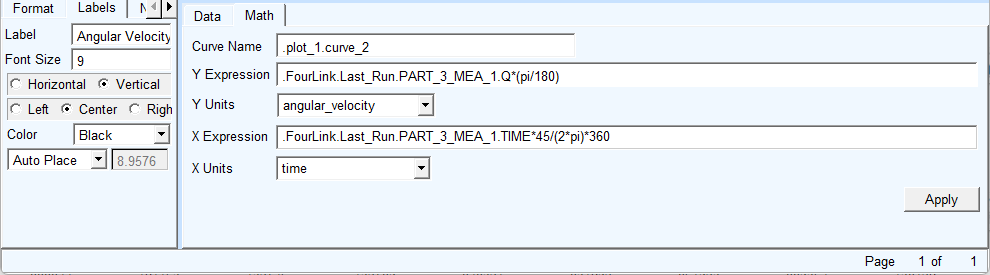
수정한 그래프를 보면 다음과 같다.
댓글남기기