ADAMS 4회
Updated:
Inclined Plane
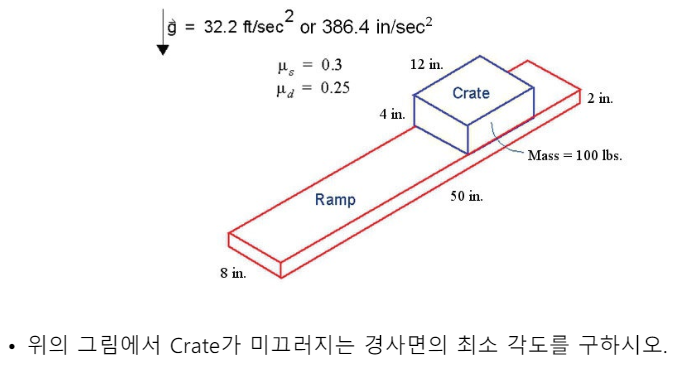
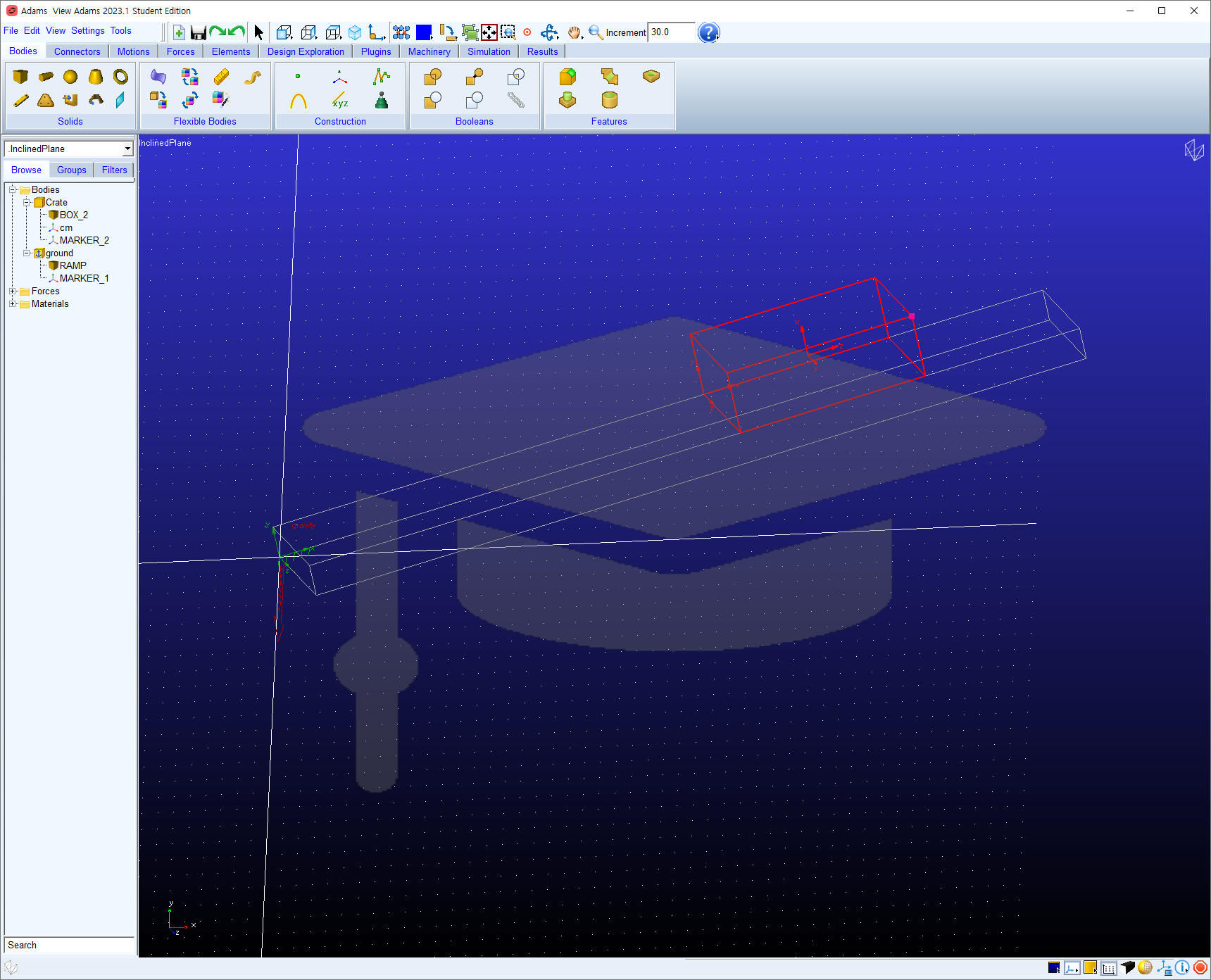
On Ground로 Box를 생성하고 New Part로 Box를 생성한다.
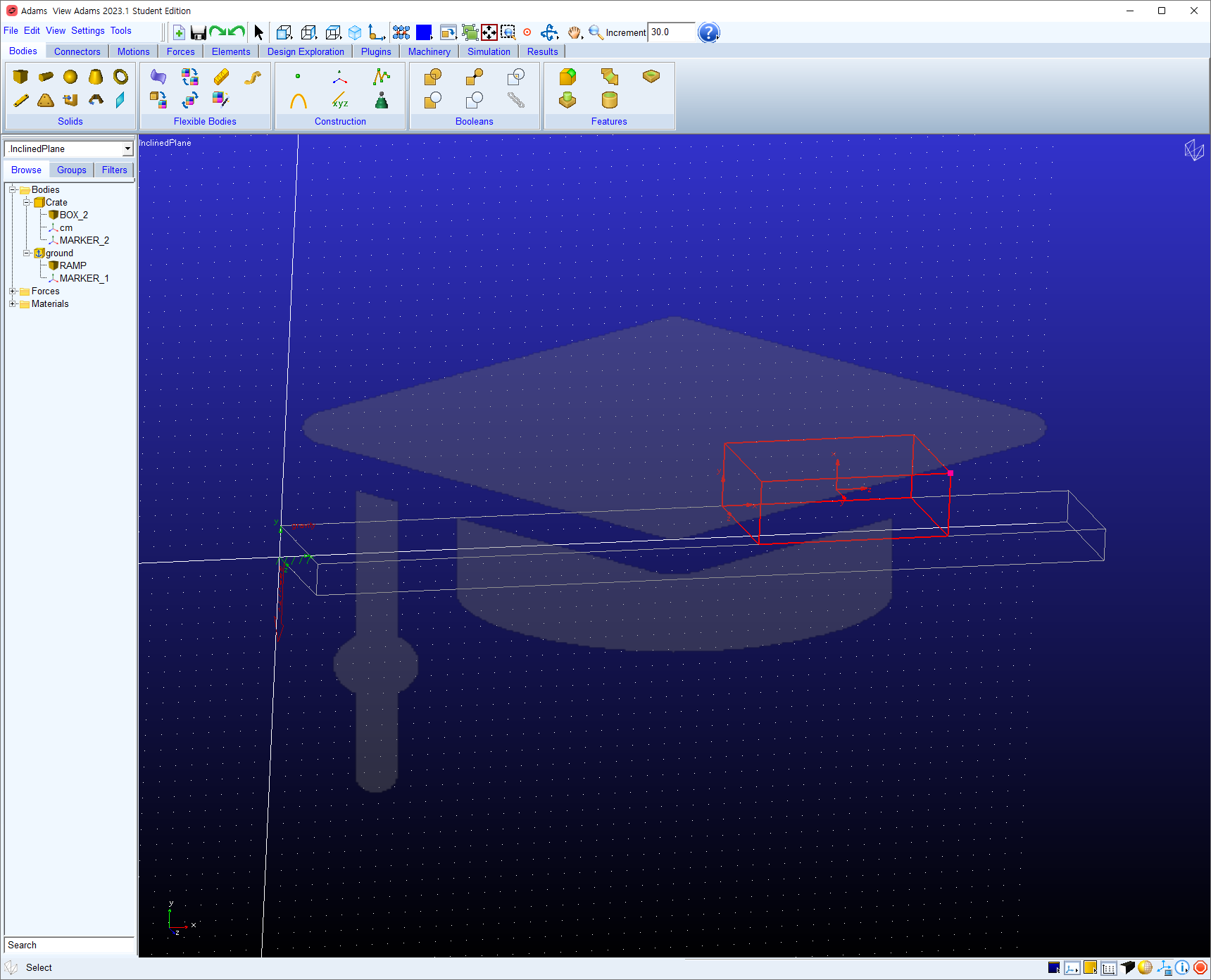
MARKER_1을 선택하여 Orientation을 (15, 0, 0)으로 변경하면 ground의 RAMP가 15도 기울어짐을 볼 수 있다.
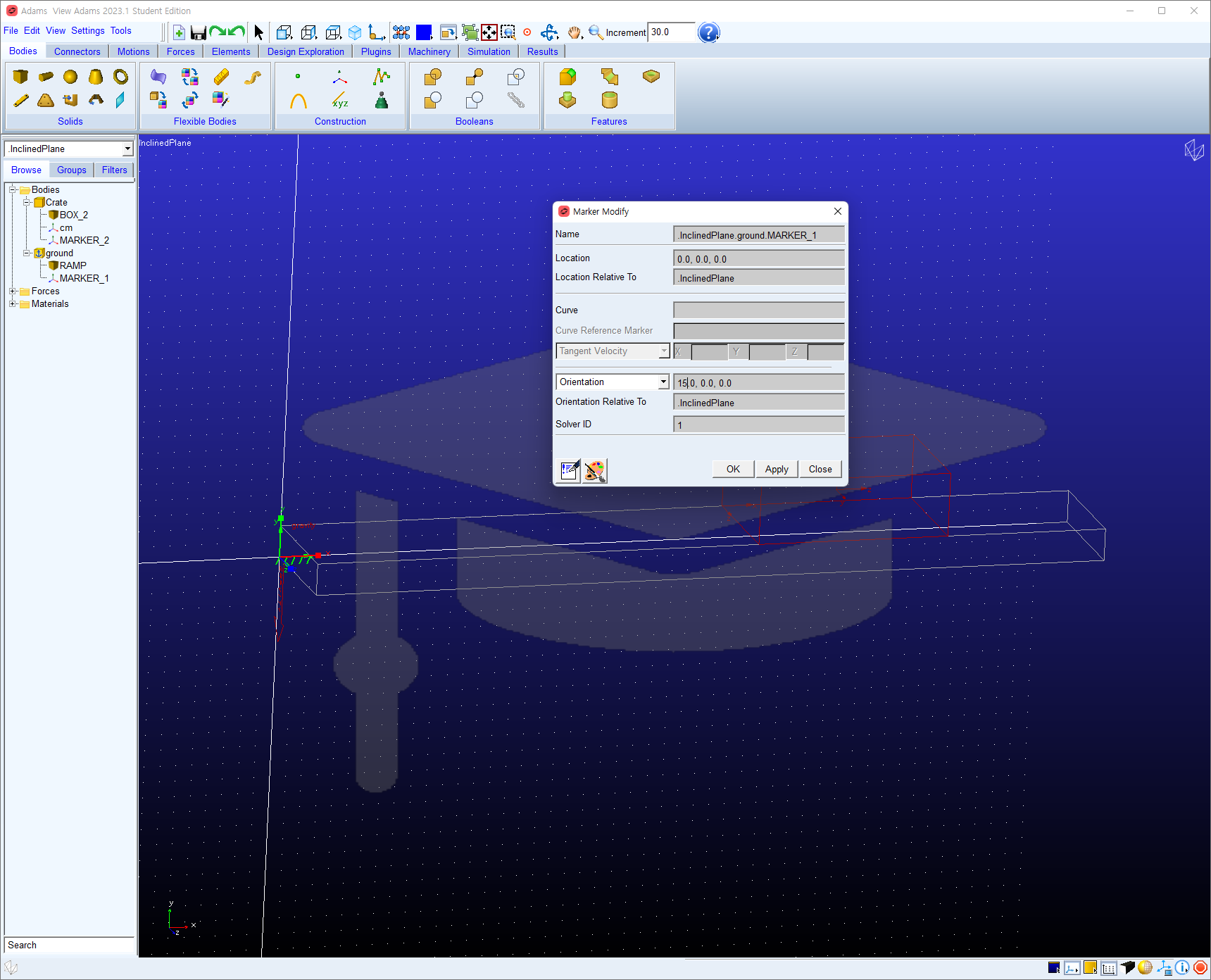
이후 Crate도 15도 회전시킨다.
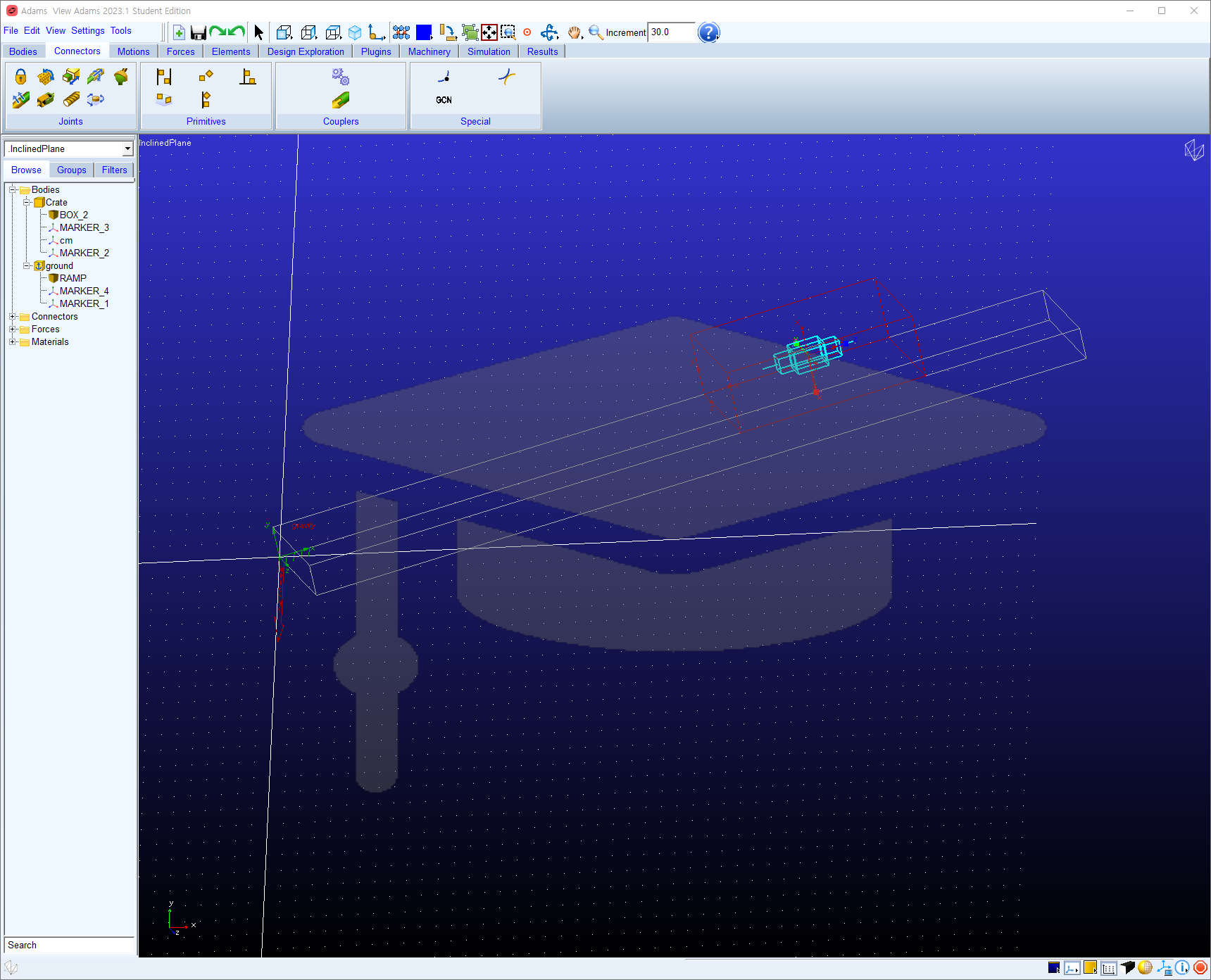
이제 Ramp와 Crate사이에 Translational Joint를 부착한다.
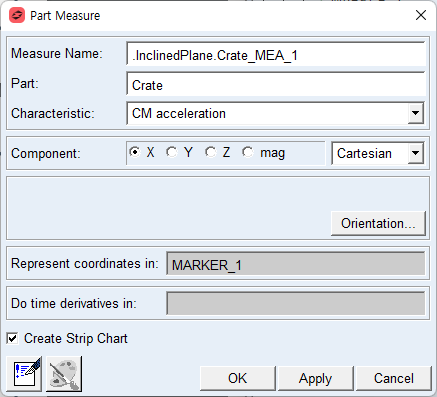
Crate의 X방향 CM acceleration을 measure로 지정하고, Represent coordivate은 MARKER_1로 지정한다. 이는 경사면 방향을 기준으로 하기위해 MARKER_1을 기준으로 한 것이다.
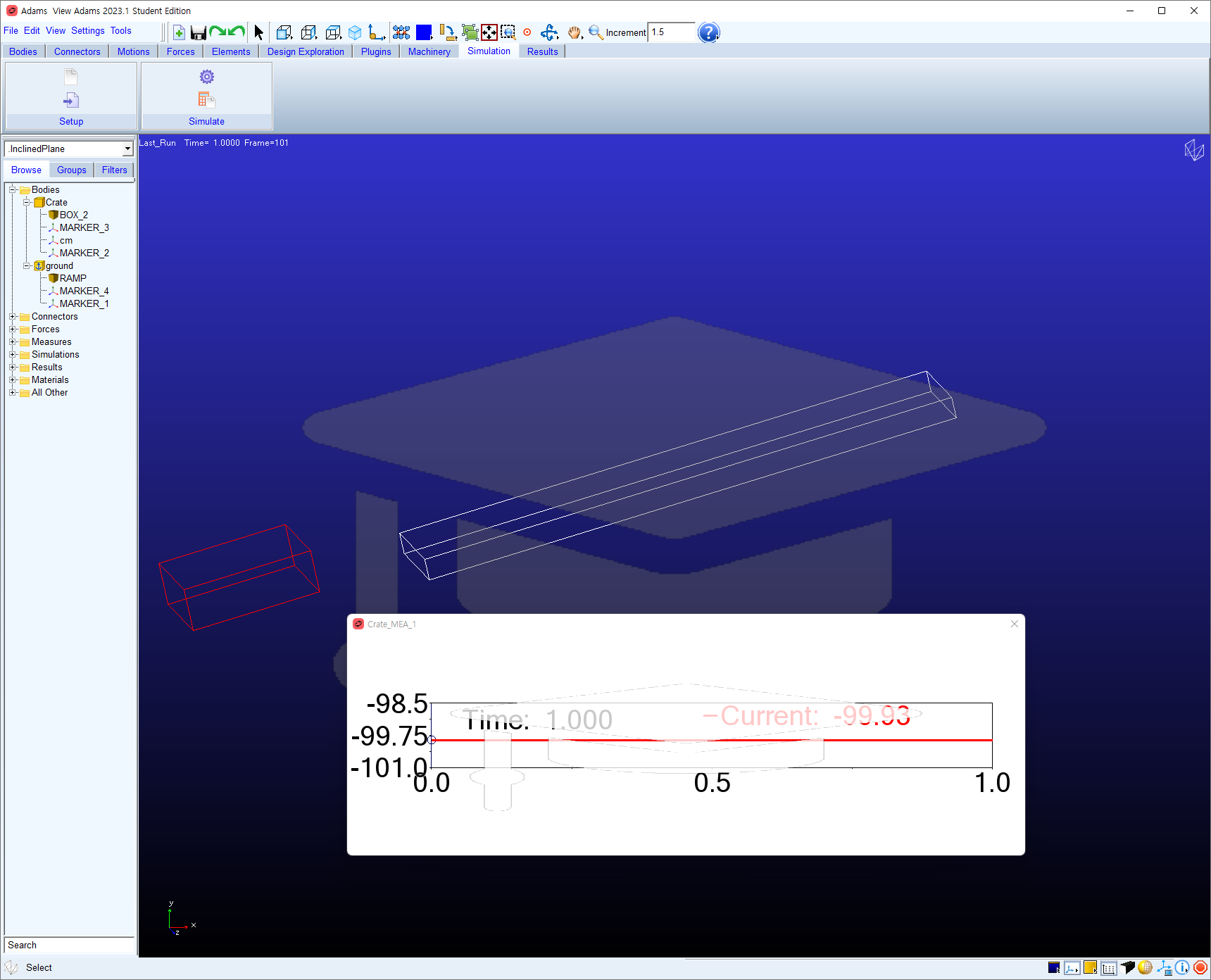
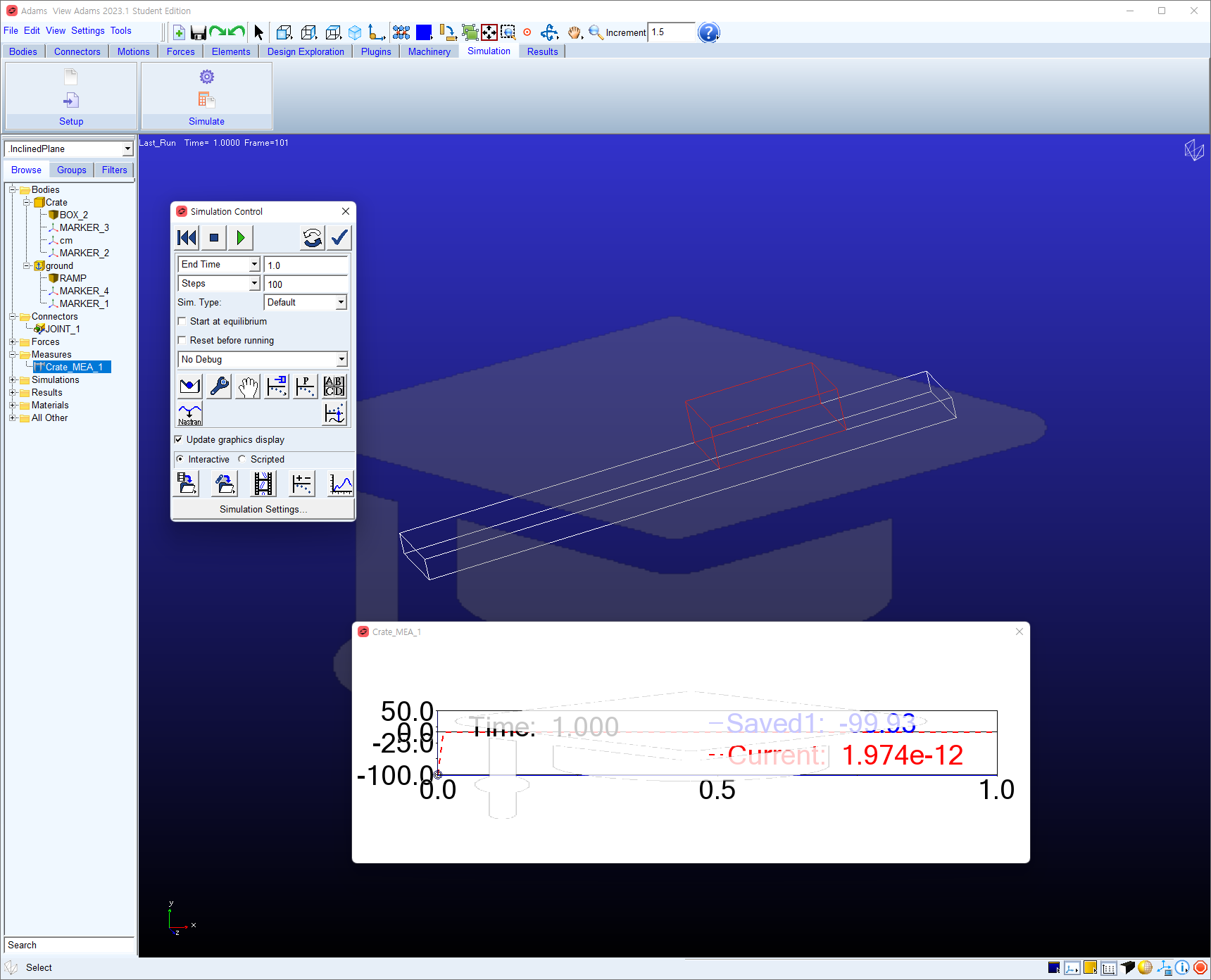
이제 1초동안 100 step으로 시뮬레이션을 시키면 다음과 같이 경사면을 내려간 것을 확인할 수 있다.
이제 경사면에 마찰력을 주어 시뮬레이션을 돌려본다. 먼저 Translation Joint를 Modify한다. Static friction 계수는 0.3, Dynamic friction 계수는 0.25로 설정하고, Bending Moment와 Torsional Moment 체크를 해제를 한다.
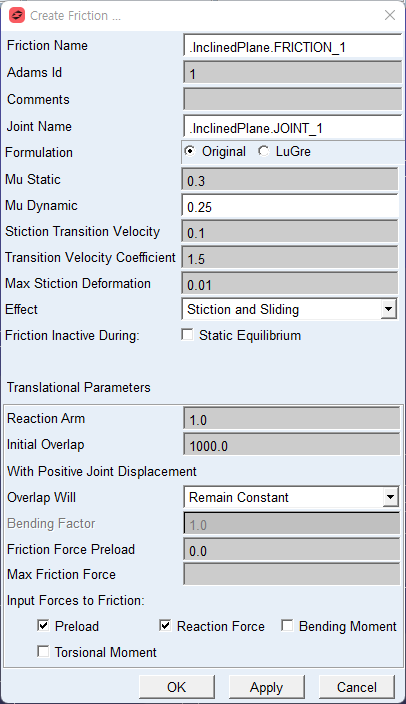
비교를 하기위해 그래프에서 기존의 그래프를 우클릭을 한 뒤 save curve를 한다. 이제 다시 시뮬레이션을 돌려보면 다음과 같이 Crate가 미끄러지지 않음을 확인할 수 있다.
Spinning Disk

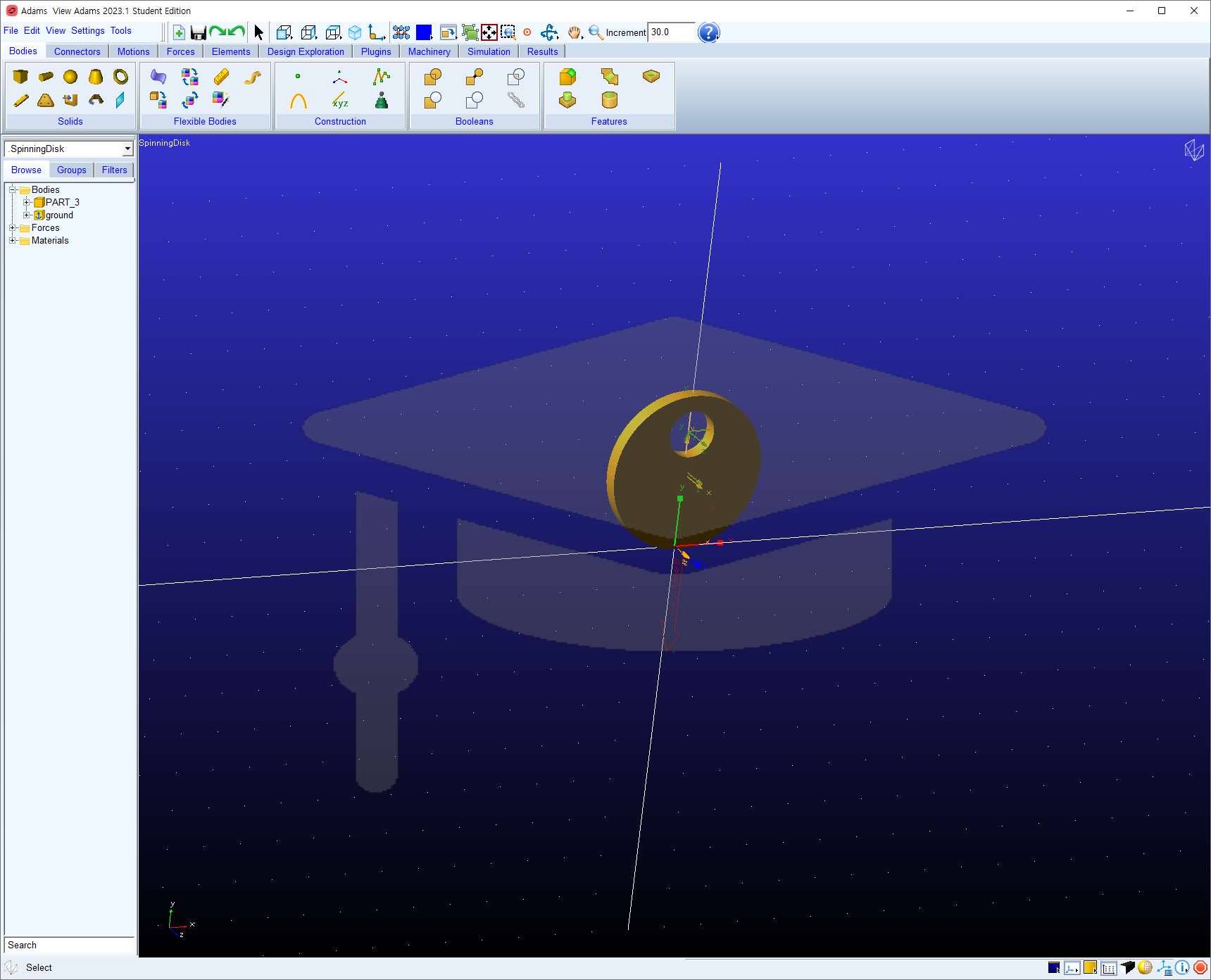
모델링을 하기 전에 (0, 100, 0)과 (0, 150, 0)에 MARKER 1과 2를 부착하고 Bodies의 Construction에서 Circle로 반경 100mm로 Marker 1을 중심위치로 하여 그린다. 이후 Solids의 Extrusion으로 두께를 설정해 주는데, Profile은 Curve, Path는 About Center, Length(Thickness)는 20mm로 설정한다.
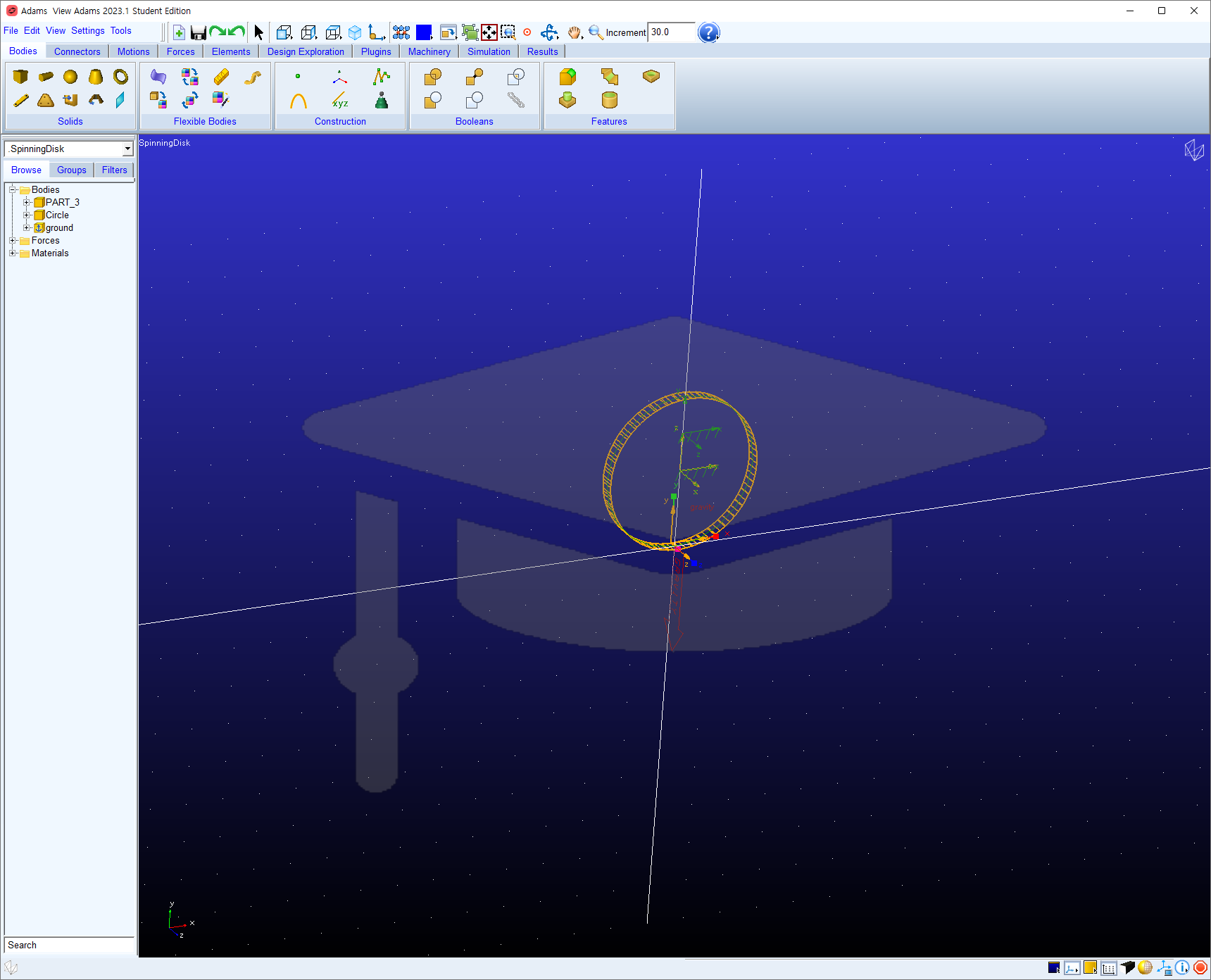
이제 작은 원을 Radius = 30mm, Center는 Marker2, Length(Thickness) = 30mm로 추가해준다. 이후, Booleans에서 Cut of a solid with another을 선택해주고 작은 원 부분을 제거한다. 이때 큰 원을 먼저 선택하고 두 번째로 작은 원을 선택해준다.
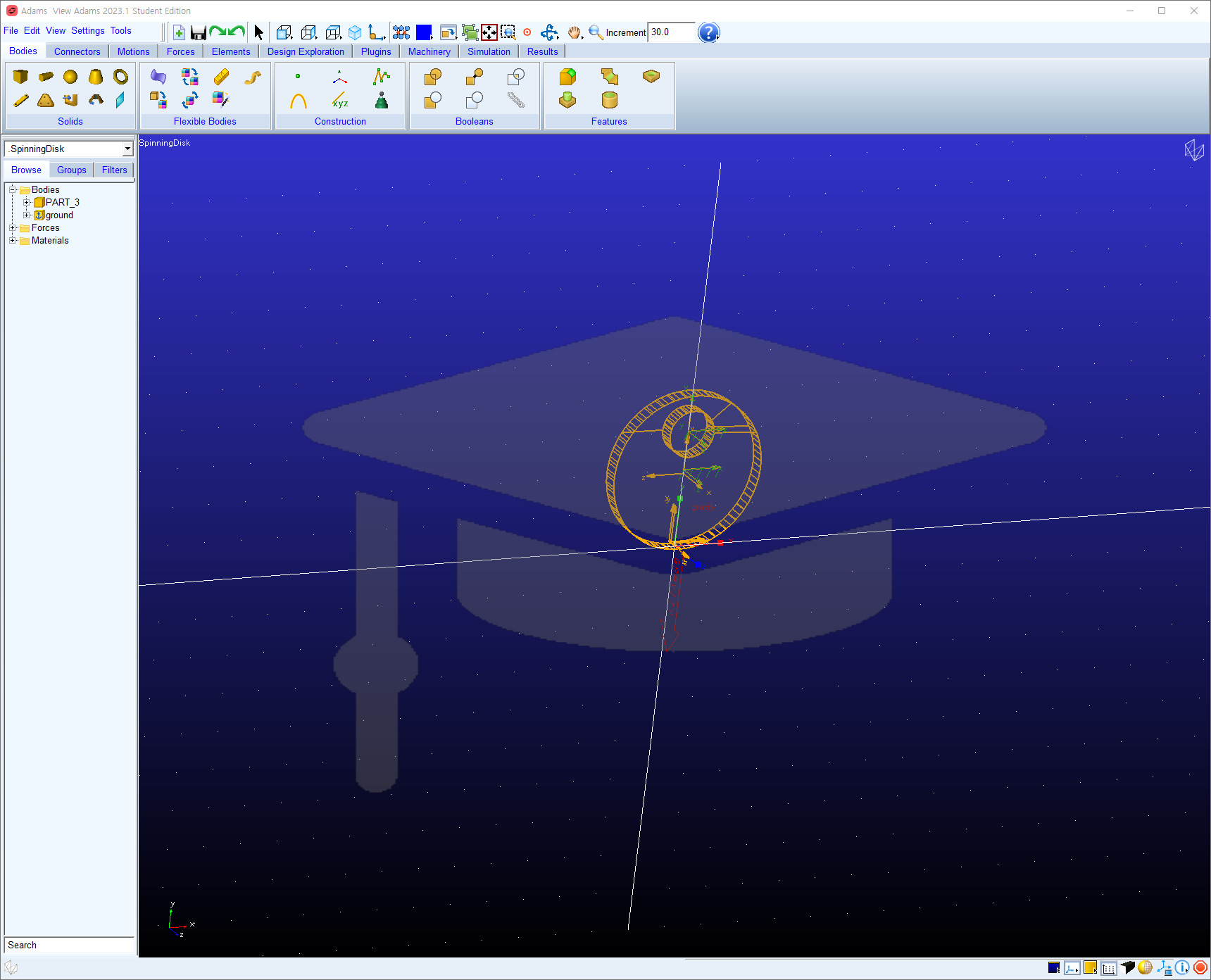
이때. 위 과정이 수행되었는지 확인하려면, View 탭에서 Rander Mode, Shaded로 하여 확인하고 모델링을 다시 하기위해 Wireframe으로 다시 한다.
그후 원의 이름을 Disk로 하고 Features에서 Fillet an Edge를 선택하고 radius 1mm로 부드럽게 만든다. 그리고 New Part로 Length 1000mm, Thickness 50mm, Width 1000mm로 바닥면을 만들어주고 이름을 Base로하고 Fixed Joint로 연결한다.
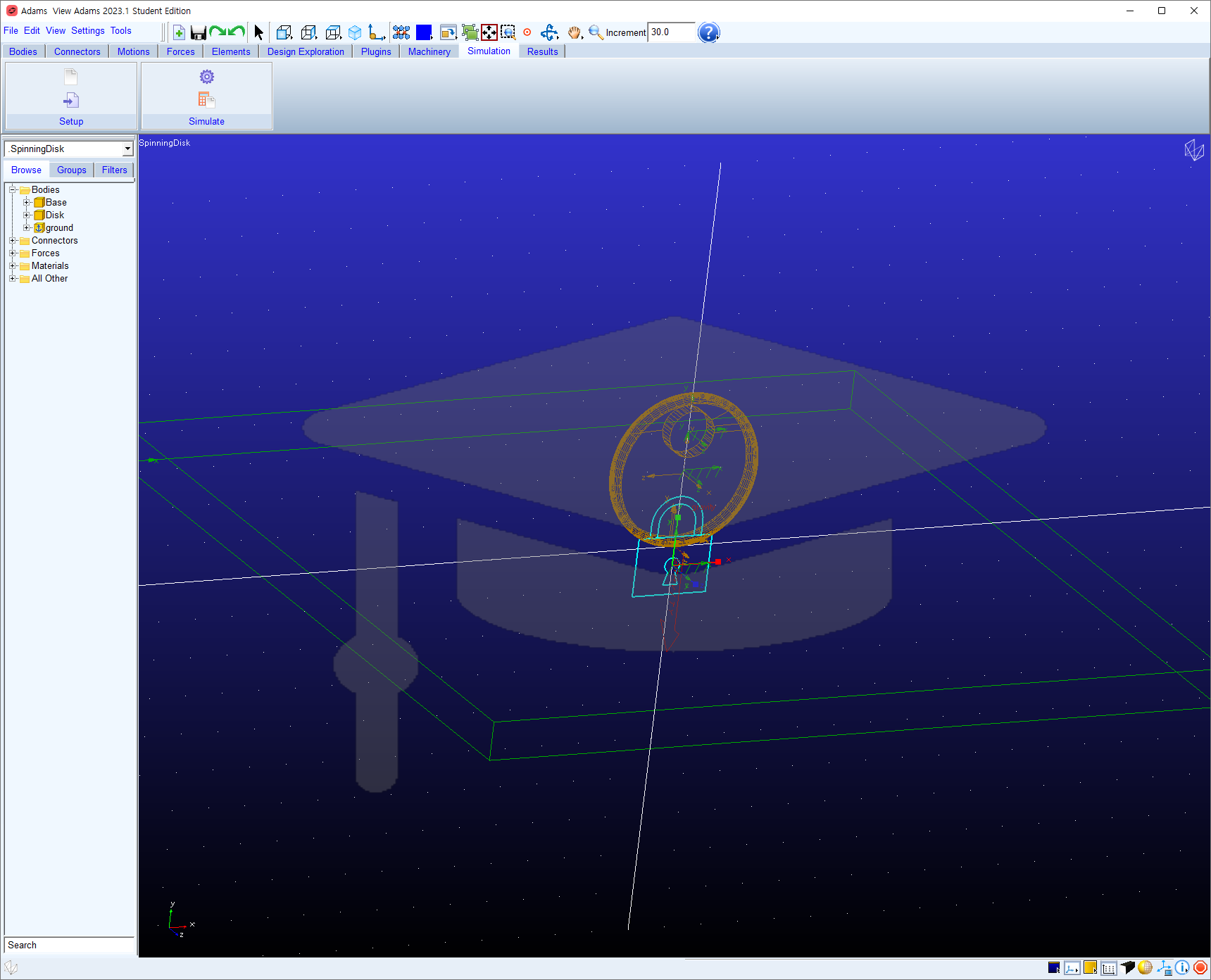
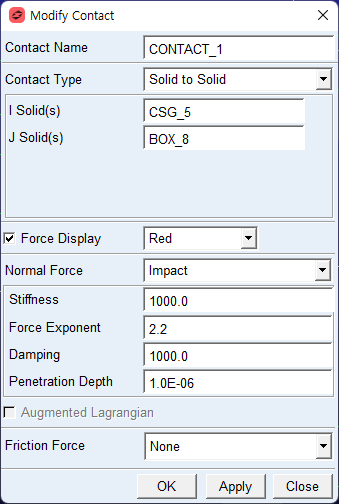
하지만 Simulation(1초, 100Steps)을 돌리면 Disk가 그냥 떨어짐을 볼 수 있다. 이를 막기 위해서 Contact조건을 줄 필요가 있다. Contact을 주기위해서 Forces에 Special Force, Contact을 선택하고 다음과 같이 설정한다. I Solid로 원판을, J Solid로 바닥을 선택해준다.
이제 Simulation에서 Static Equilibrium을 클릭하면 정적 평형상태가 찾아짐을 확인할 수 있다. 그후 Disk를 회전시켜주는 Torque를 입력해준다. Torque가 작용할 지점(0, 190, 0)에 Marker를 추가한다. 이후 Forces를 Torque를 선택하고 Run time direction은 Space Fixed로, Construction은 Pick Feature로하고, 추가된 Marker를 지정하고 토크 벡터의 방향은 수직 상방 방향으로 지정한다. 그리고 토크의 함수는 100000*(STEP(time, 0.1, 0, 0.11, 1) - STEP(time, 0.11, 0, 0.12, 1))로 설정한다. 여기서 STEP은 단위계단함수로 STEP(time, 0.1, 0, 0.11, 1)는 0.1초까지 함수 값이 0이고 0.11부터 1이 된다는 의미이다. 위 입력 함수에서 두 STEP함수를 뺐으므로 이는 충격력과 같은 의미임을 알 수 있다.
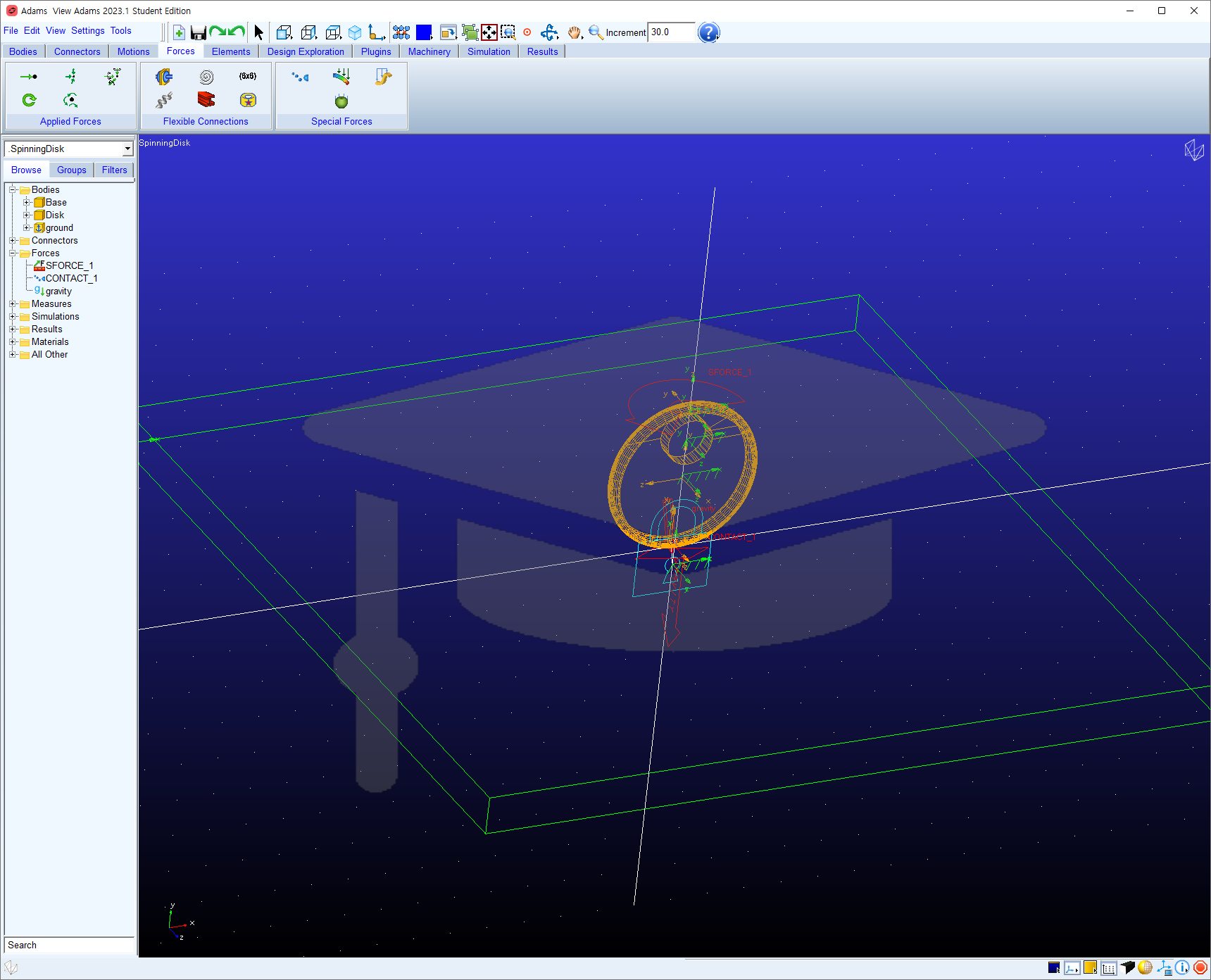
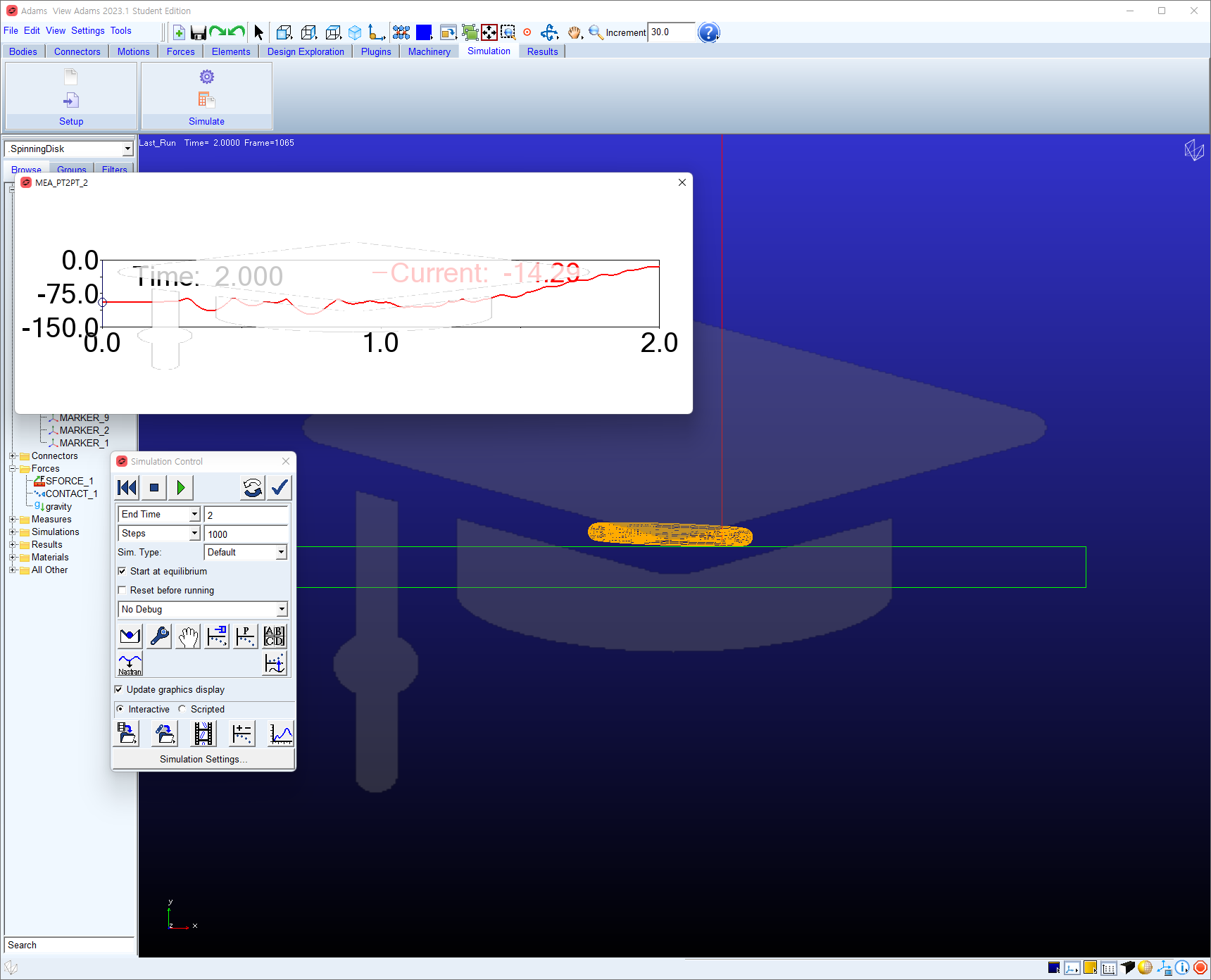
이제 Measure을 하기위해 (0, 0, 0)에 Marker를 추가하고 Disk의 cm과 추가한 Marker간의 Y변위 계측을 설정한다. 계측을 하는 도구로 Point-to-Point를 선택하고 Advanced를 클릭후, 두 Point에 두 점을 입력하고 Y 변위를 계측한다. 이후 Start at equilibrium을 클릭하고 2초간 1000Steps로 Simulation을 돌려보면 Disk가 회전하면서 바닥에 떨어짐을 확인할 수 있다.
Slider-Link
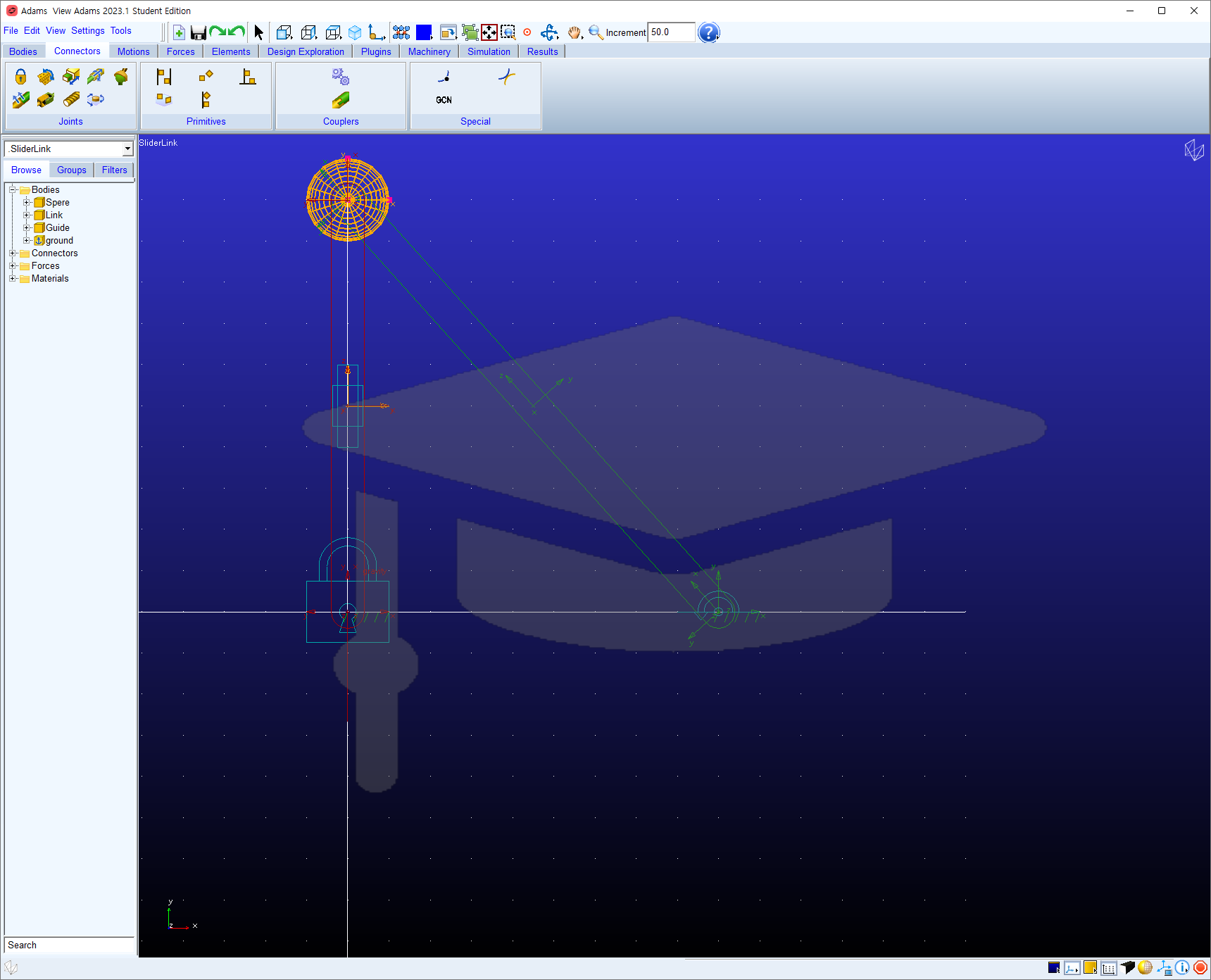
가이드의 아래부분에 Fixed Joint를 Link의 아래부분에 Revolute Joint를 연결한다. 그리고 가이드와 링크가 만나는 지점에 Sphere를 배치한다. Sphere는 가이드를 따라 아래로 움직여야 하므로 Translational Joint를 가이드-Sphere간 연결한다.
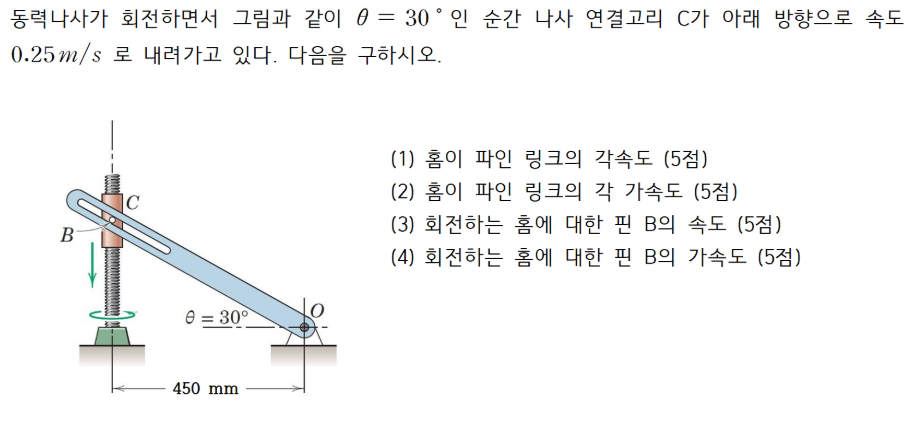
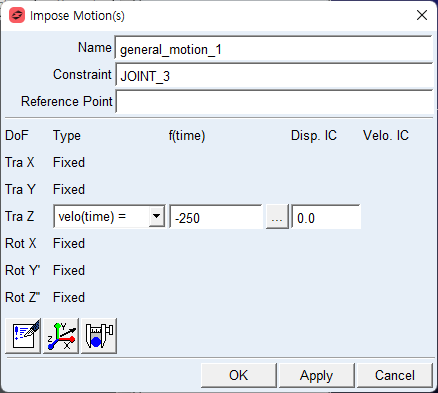
구가 아래로 속도 0.25m/s로 내려가므로 Translational Joint에 Motion을 부여한다.
구는 링크를 따라서도 병진해야 하므로 Translational Joint를 연결(링크-Sphere)한다. 이제 2초간 Step size 0.01로 시뮬레이션을 수행하면 에러가 발생한다.
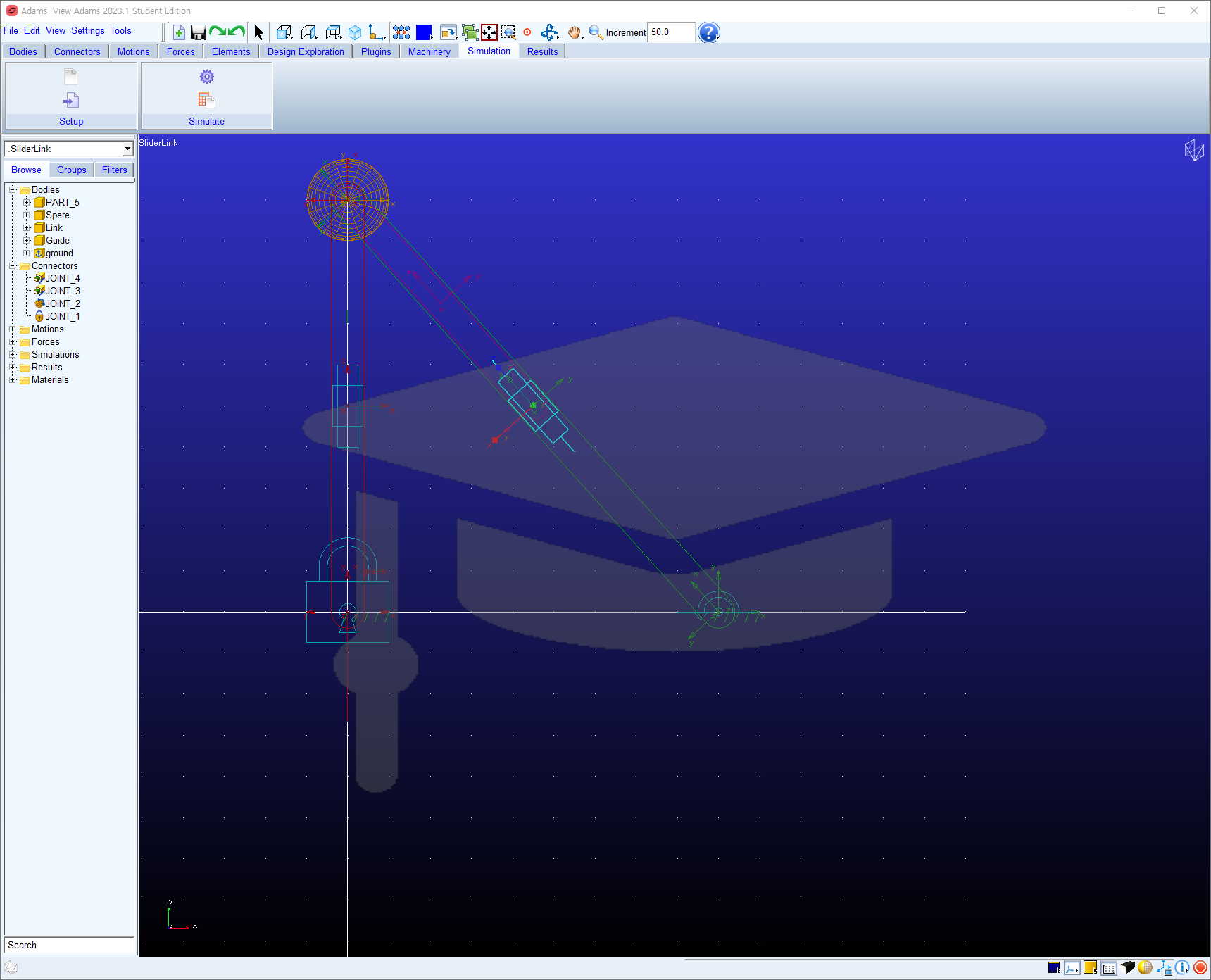
구는 가이드와 병진운동 하면서 동시에 링크와 병진할 수 없다. 즉, 구와 링크 사이에 회전과 병진이 허용되어야 한다. 그래서 구와 링크사이에 부착했던 Translational Joint는 제거하고 슬라이더와 링크사이에 재 부착하고 구와 슬라이더 사이에는 Revolute Joint를 부착한다.
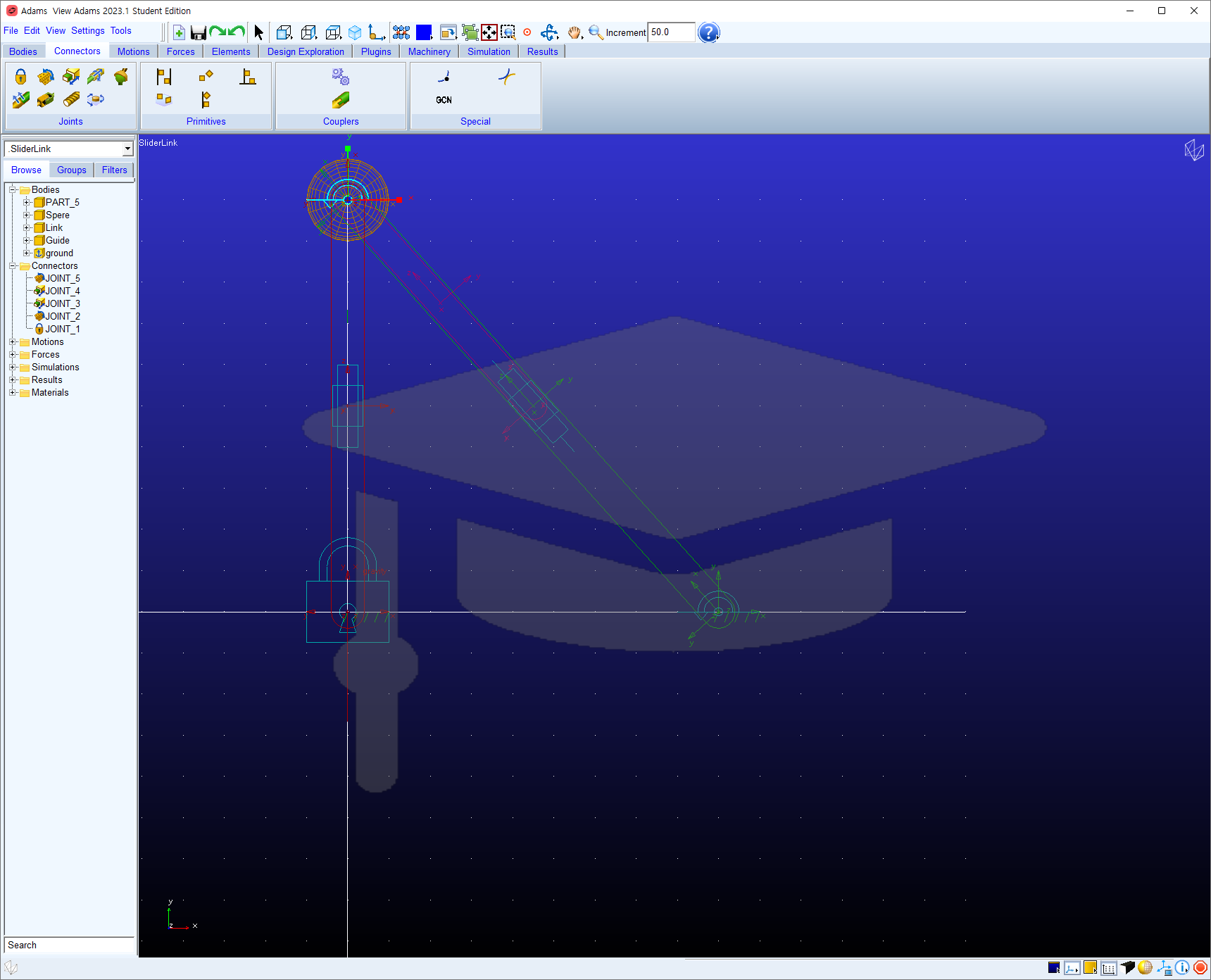
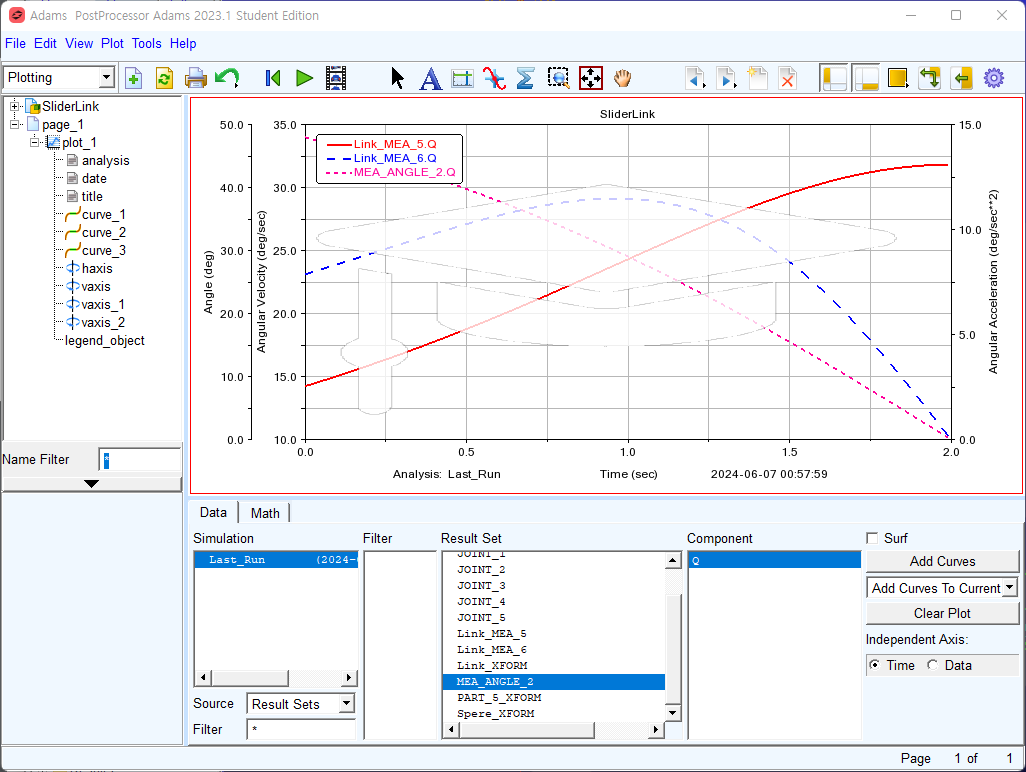
시뮬레이션을 실행하면 구가 올라가는 것을 볼 수 있는데 Guide와 Sphere사이에 부착했던 Translational Joint의 속도를 250으로 수정해준다. 또한 작동 확인 후, 링크 각도가 30도인 순간을 확인하기 위한 Angle Measure를 입력한다. 이후, Link의 각속도와 각가속도를 구하면 다음과 같다.
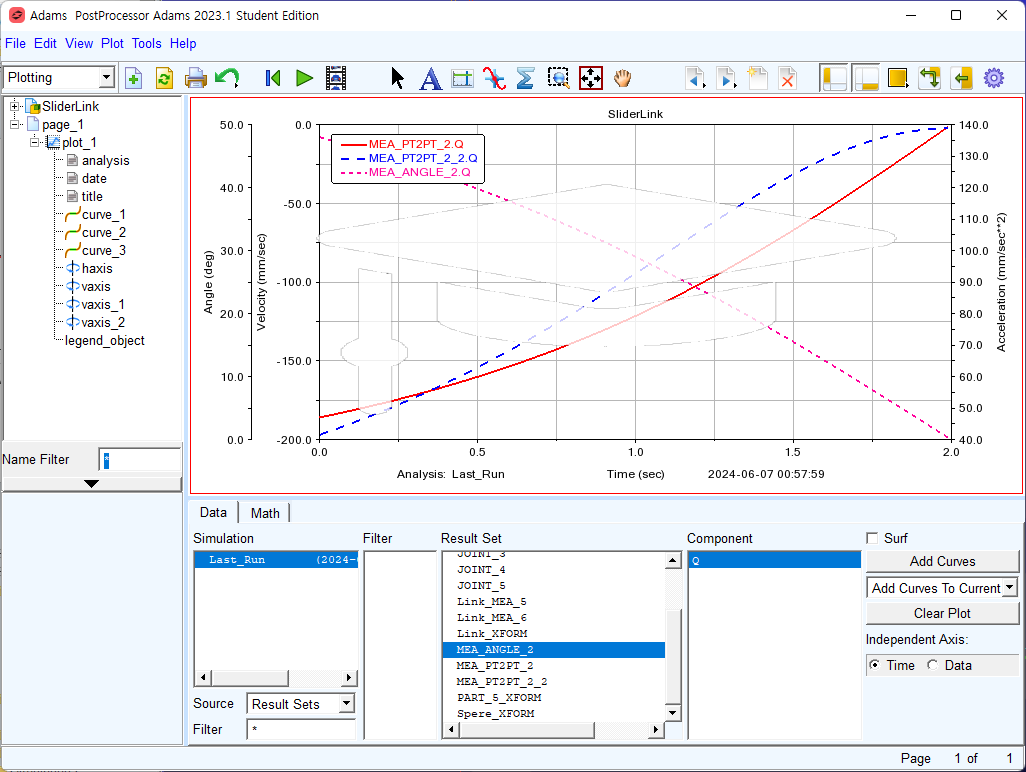
이제 회전하는 홈에 대한 핀B의 속도와 가속도를 구한다.
댓글남기기